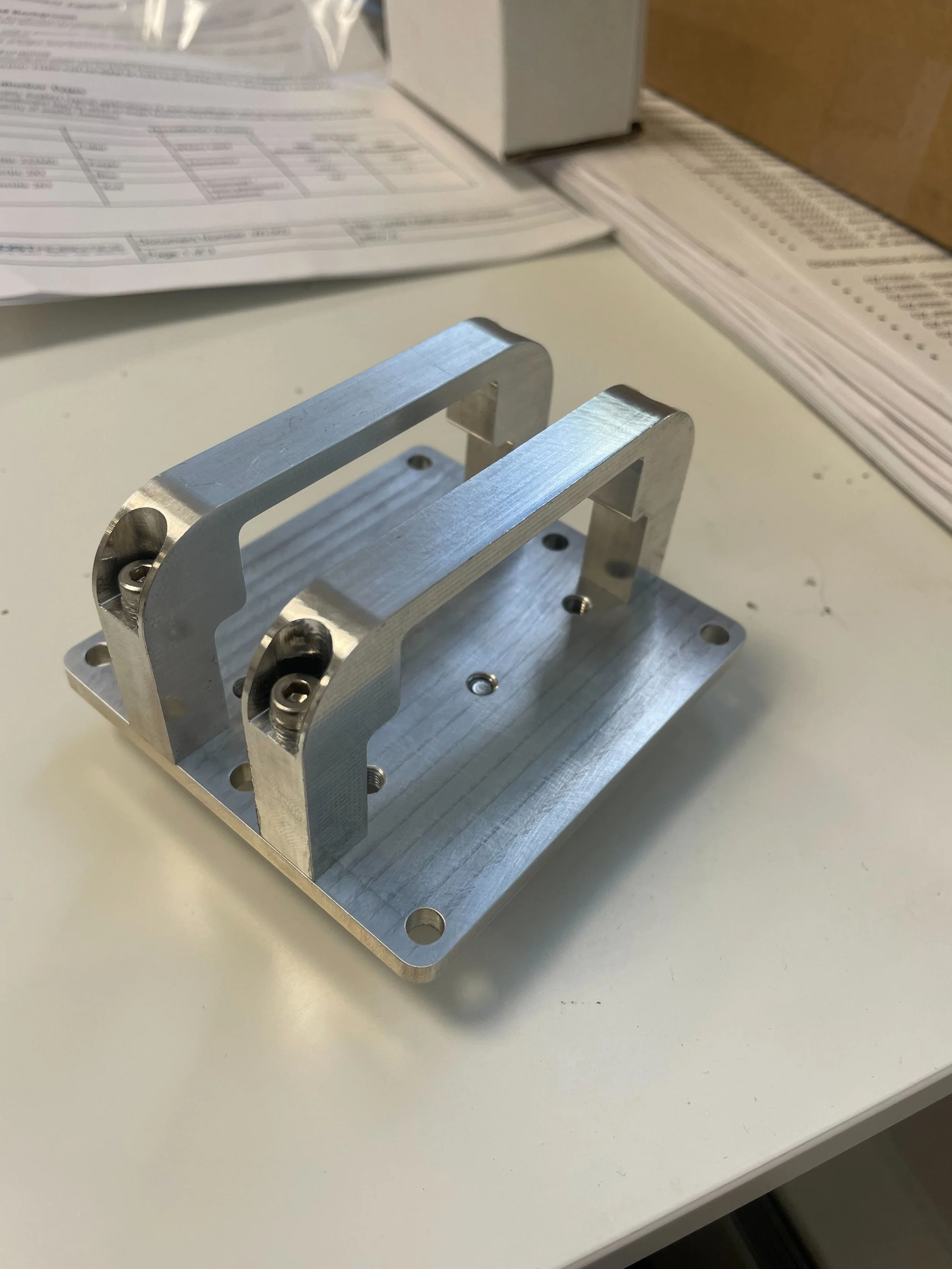
This project served to allow a MANET radio to be mounted to the Ghost Robotics Vision60 Q-UGV. The prior state-of-the-art included zipties and tape, and a more well put-together mount was desired to protect the installed radio from any potential damage. End users desired the radio to withstand a rollover of the Q-UGV system, as well as an easily detachable fastening solution to allow for battery changes.
Below is the process used to execute the design of this payload.
Consult end users to understand use case and desired performance metrics
Develop project specification to capture performance metrics, must-have features, and desirable characteristics
Connect with third-party companies to gain access to ICD of payload equipment
Sketch preliminary geometry of payload mount, capturing key geometry of robot and payload to ensure proper fit
Host design review with Ghost Robotics engineering team to ensure design meets specification
Fabricate prototype components for test fit
Send prototype to end users for additional comments and suggestions
Document internal and external assembly procedures

Radio mounting payload for Ghost Robotics Vision60 Q-UGV
End users of the Ghost Robotics Q-UGV desired an easily-mountable and protective solution to mount a third-party LiDAR scanner on its top deck. The Leica LiDAR, pictured to the left, is one such system. Development of this integration began with an ad-hoc solution, with power provided from a spare Waygo connector and mounted via existing holes on the robot’s chassis.
This integration is an example of quick-turn proof-of-concept developments I have enabled during my time at Ghost Robotics
